Geospatially-Aware Edge Computing for Intelligent Transportation: UAV-Assisted Scheduling, Cloud-Edge-End Collaboration, and Large Language Model Deployment
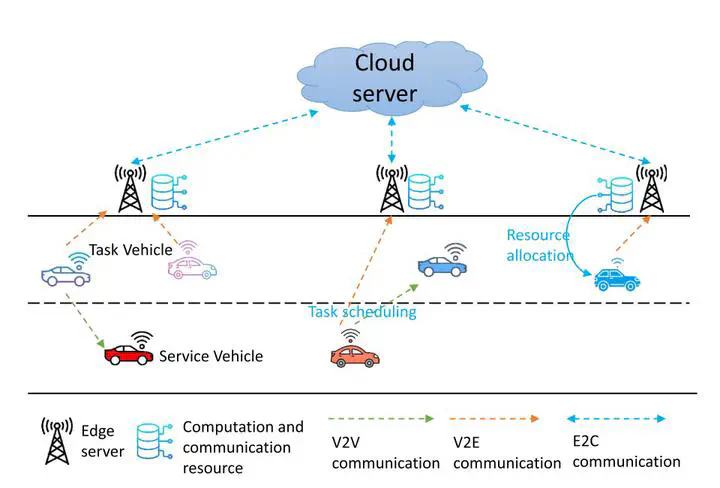 Image credit: Unsplash
Image credit: UnsplashAbstract
Vehicular edge computing (VEC) is becoming a cornerstone of intelligent transportation systems, allowing real-time processing of massive data generated by autonomous and connected vehicles. However, traditional VEC approaches face limitations when dealing with complex, geographically diverse environments, where geological conditions such as terrain variability, weather patterns, and environmental disruptions can drastically affect system performance. Unmanned Aerial Vehicles (UAVs) offer a dynamic solution to these challenges, acting as mobile edge computing nodes that can supplement static edge infrastructure, especially in regions with challenging geotechnical conditions. Furthermore, a collaborative cloud-edge-end model ensures robust communication and efficient data distribution in such environments. The deployment of large language models (LLMs) at the edge further augments decision-making by providing real-time geospatial and semantic understanding, enhancing the adaptability of the system. This research aims to combine these cutting-edge technologies with insights from geoscience and geotechnical engineering to create a comprehensive framework that adapts to the geographical and environmental constraints of vehicular networks.
References:
- Li, P., Xiao, Z., Wang, X., Huang, K., Huang, Y., & Gao, H. (2023). EPtask: Deep reinforcement learning based energy-efficient and priority-aware task scheduling for dynamic vehicular edge computing. IEEE Transactions on Intelligent Vehicles. ref
- Li, P., Wang, X., Gao, H., Xu, X., Iqbal, M., & Dahal, K. (2021). A dynamic and scalable user-centric route planning algorithm based on polychromatic sets theory. IEEE transactions on intelligent transportation systems, 23(3), 2762-2772. ref